
伺服电机工作,优缺点
伺服意味着一种误差感知反馈控制,它被用来纠正系统的性能。它还需要一个复杂的控制器,通常是专门为伺服电机设计的专用模块。伺服电机是直流电动机,允许精确控制的角度位置。它们是直流电动机,其速度通过齿轮缓慢降低。伺服电机的转速通常在90°到180°之间被切断。一些伺服电机也有360°或更多的革命切断。但是伺服电机不会不停地旋转。它们的旋转限制在固定的角度之间。
伺服电机由四部分组成:普通直流电机、齿轮减速单元、位置感应装置和控制电路。直流电机的与齿轮机构连接,齿轮机构提供反馈到位置传感器,位置传感器主要是一个电位器。从变速箱,电机的输出通过伺服花键传送到伺服臂。对于标准伺服电机,齿轮通常是由塑料组成,然而,对于大功率伺服,齿轮是由金属组成。
伺服电机由三根线组成——一根黑色的线连接到地面,一根白色/黄色的线连接到控制单元,一根红色的线连接到电源。
伺服电机的功能是接收控制信号,代表伺服轴的期望输出位置,并向其直流电机施加功率,直到其轴转到该位置。
它使用位置感应装置来计算轴的旋转位置,这样它就知道电机必须朝哪个方向转动才能将轴移动到指定的位置。轴一般不会像直流电动机那样自由旋转,而是只能转动200度。

从转子的位置,一个旋转磁场被创建,以有效地产生转矩。电流在线圈中流动,产生一个旋转的磁场。轴传递电动机的输出功率。负载是通过传递机制驱动的。高功能稀土或其他永磁体置于轴的外部。光学编码器总是监视轴的旋转次数和位置。


伺服电机的工作
伺服电机由直流电机、齿轮系统、位置传感器和控制电路组成。直流电动机的动力来自电池,运行在高速和低扭矩。齿轮和轴总成连接到直流电机降低这个速度为足够的速度和更高的扭矩。位置传感器从轴的确定位置感知轴的位置,并将信息反馈给控制电路。控制电路相应地对位置传感器发出的信号进行解码,将电机的实际位置与期望位置进行比较,并相应地控制直流电机的旋转方向以获得所需的位置。伺服电机一般要求直流电源为4.8V ~ 6 V。
控制伺服电机
利用脉冲宽度调制技术对伺服电机进行位置控制。应用于电机的脉冲宽度是变化的,并发送固定的时间。
脉冲宽度决定了伺服电机的角度位置。例如,1毫秒的脉冲宽度导致角位置0度,而2毫秒的脉冲宽度导致角宽度180度。
优点:
- 如果在电机上放置一个大负载,当它试图旋转电机时,驱动器将增加电机线圈的电流。不存在不同步的情况。
- 高速运转是可能的。
缺点:
- 由于伺服电机试图按照指令脉冲进行旋转,但存在滞后现象,因此不适合进行精确的旋转控制。
- 更高的成本。
- 当停止时,电机的转子继续来回移动一个脉冲,所以如果需要防止振动是不合适的
7伺服电机的应用
伺服电机用于要求快速变化的速度,而不使电机过热的应用。
- 在工业中,它们被用于机床,包装,工厂自动化,材料搬运,印刷转换,装配线,和许多其他要求很高的应用机器人,数控机械,或自动化制造。欧洲杯四强竞猜平台
- 它们也被用于无线电控制飞机,以控制电梯的定位和运动。
- 由于它们的平滑开关和精确定位,它们被用于机器人。
- 它们也被航空航天工业用于维护液压系统中的液压油。
- 它们被用于许多无线电控制的玩具中。
- 它们被用于dvd或蓝光影碟机等电子设备中,以扩展或重放光盘托盘。
- 它们也被用于汽车,以保持车辆的速度。
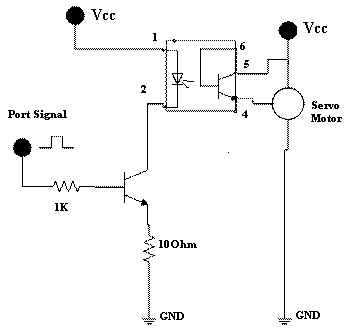
伺服电机应用电路
应用电路如下:每个电机有三个输入:VCC、接地和周期性方波信号。方波的脉冲宽度决定了伺服电机的速度和方向。在我们的例子中,我们只需要改变方向,让设备向前、向后移动,并向左和向右转弯。如果脉宽在一定的时间范围内,电机将顺时针方向驱动。如果脉冲宽度超过这个时间范围,电机将以逆时针方向驱动。中间时间可以通过电机内部内置的电位器进行调整。
3 .步进电机与伺服电机的区别:
- 步进电机有大量的磁极,由永磁体产生的磁对,或电流。伺服电机极少;每个杆提供了一个电机轴的自然停止点。
- 步进电机低速时的转矩大于相同尺寸的伺服电机。
- 步进电机的操作是由脉冲发生器输出命令同步脉冲信号。相反,伺服电机的操作滞后于命令脉冲。
现在你对伺服仪表的工作有了一个想法,如果你对这个主题或电气和电子项目有任何疑问,请在下面留下评论。2021欧洲杯足球竞猜官方平台
图片来源
- 伺服电机,维基
分享这篇文章:

你好,先生,这是非常有用的信息。我正在做一个项目,我想使用伺服电机。基本上,我需要以特定的角度前后转动脚踝。那么,伺服器会是一个完美的选择吗??
嗨Pankaja
是的,当然
伟大的网站!看起来好极了!坚持这份有益的工作