
什么是步进电机:类型及其工作
步进电机是机电装置,它将电力转换为机械功率。2021欧洲杯足球竞猜官方平台此外,它是一种无刷的同步电动机,可以将完全旋转分成膨胀的步数。只要电机被仔细尺寸为应用,就可以精确地控制电机的位置而没有任何反馈机制。步进电机类似于切换磁阻电机。步进电机使用用于磁体的操作理论,使电动机轴在提供电脉冲时使电动机轴变得精确距离。定子有八个杆,转子有六个极点。转子将需要24个电力来移动24个步骤以使一个完全旋转。另一种说明这一点是,对于电动机接收的每个电脉冲,转子将精确地移动15°。
建筑与工作原理
这步进电机的构造与a相当相关直流电机。它包括一个永磁体像转子是在中间&它将转动,一旦力作用于它。这个转子是通过一个no。定子被一个布满的磁性线圈所缠绕。定子靠近转子,以便定子内的磁场能够控制转子的运动。

步进电机可以通过每个定子逐一激励每个定子来控制。因此,定子将像电磁杆一样磁化,类似于转子上的排斥能量前进。定子的替代磁化以及退磁将逐渐移动转子,并允许它通过很大的控制来转动。
这步进电机工作原理是电磁。它包括由永磁体制成的转子,而定子具有电磁体。一旦提供给定子的绕组,那么磁场将在定子内开发。现在电机中的转子将开始与定子的旋转磁场一起移动。所以这是这款电机的基本工作原理。

在该电动机中,有一种柔软的铁,通过电磁定子包围。定子的极点以及转子不依赖于步进器的那种。一旦该电动机的定子通电,那么转子将旋转以将其自身旋转,否则将其转向通过定子的最小间隙。通过这种方式,定子在串联中激活以旋转步进电机。
驾驶技巧
步进电机驾驶技术由于它们的复杂设计,可以使用一些特殊电路。有几种方法来驱动该电动机,下面通过举个四相步进电机的示例讨论其中一些。


单励磁模式
驱动步进电机的基本方法是单一的激励模式。这是一种旧方法,目前没有多少使用,但必须了解这项技术。在该技术中,每个阶段否则彼此相邻的定子将被替代地触发特殊电路。这将使定子磁化和退出定子以向前移动转子。
全步车
在该技术中,一次在一个时间内激活两个定子,而不是在更少的时间内激活。该技术导致高扭矩并允许电动机驱动高负荷。
半步驱动
该技术与完整的阶梯驱动相当相关,因为两个定子将彼此相邻布置,以便首先被激活,而第三个定子将被激活,而第三则将被激活。这种循环首先切换两个定子,然后在第三个定子之后将驱动电动机。该技术将导致步进电机的改进的分辨率,同时降低扭矩。
微踩踏
由于其准确性,该技术最常使用。可变步进电流将供应步进电机驱动电路朝向正弦波形形式的定子线圈。通过该小步骤电流可以提高每一步的准确性。这种技术广泛使用,因为它提供高精度,并且在很大程度上降低了操作噪声。
步进电机电路及其操作
步进电机不同地运行直流刷电机当电压施加到其端子时旋转。另一方面,步进电动机有效地具有围绕中心齿轮形钢的多个齿形电磁铁。电磁铁通过外部控制电路(例如微控制器)为通电。
为了使电动机轴转动,给出一个电磁铁的功率,这使得齿轮的齿磁性吸引到电磁铁的牙齿。在齿轮的牙齿因此与第一电磁铁对齐时,它们略微偏离下一个电磁铁。因此,当下一个电磁铁接通并且首先关闭时,齿轮稍微旋转以与下一个和从那里对准过程。每个略微旋转被称为步骤,具有整数的步骤,使得全旋转。
以这种方式,可以通过精确转动电机。步进电机不会连续旋转,它们的步骤旋转。有4个线圈90O.固定在定子上的相互夹角。步进电机的连接是由线圈的连接方式决定的。在步进电机中,线圈没有连接。马达有一个90O.旋转步骤与线圈以循环顺序激励,确定轴旋转方向。
通过操作开关显示该电机的工作。线圈以1秒间隔串联激活。轴旋转90O.每次激活下一个线圈。其低速扭矩将直接变化电流。
步进电机的类型
有三种主要类型的步进电机,它们是:
- 永久磁铁步进
- 混合同步步进
- 可变磁阻步进
永磁步进电机
永磁电机在转子中使用一个永磁铁(PM),并在转子PM和定子电磁铁之间的吸引或排斥上运行。
这是与市场上可用的不同类型的步进电机相比,这是最常见的步进电机类型。该电动机包括在电动机结构中的永磁体。这种电机也称为锡罐/罐堆电机。该步进电机的主要好处较少的制造成本。对于每一场革命,它有48-24步。
可变磁阻步进电机
可变磁阻(VR)电动机具有普通的铁转子,并且基于最小间隙发生的最小磁阻的原理操作,因此转子点朝向定子磁极被吸引。
变量磁阻的步进电机是电机的基本类型,它用于过去多年。顾名思义,转子的角度位置主要取决于磁路的不稳定性,该磁路可以在定子的齿和转子之间形成。
混合同步步进电机
混合步进电机的命名是因为他们使用永磁体(PM)和可变磁阻(VR)技术的组合,以实现最大的功率在小包装尺寸。
最受欢迎的电机类型是混合步进电机因为它在速度,步进分辨率和保持扭矩方面与永磁转子相比提供了良好的性能。但是,与永磁步进电机相比,这种类型的步进电机价格昂贵。该电机结合了永磁体和可变磁阻步进电机的特点。使用这些电动机,其中需要较少的步进角度,如1.5,1.8和2.5度。
如何选择步进电机?
在选择你需要的步进电机之前,检查电机的转矩-转速曲线是非常重要的。所以这个信息可以从电机的设计者那里得到,它是电机在特定速度下的转矩的图形符号。电机的转矩-转速曲线应与应用的需要密切匹配;否则无法达到预期的系统性能。
布线类型
步进电机通常是单极的两相电动机,否则是双极。对于单极电机中的每个相,有两个绕组。这里,中心螺纹是两个绕组之间的常见引线朝向杆之间。单极电机有5到8个引线。
在施工中,在两极的共同划分的情况下,该步进电机包括六个引线。如果两个杆子中心水龙头内部短,那么该电机包括五个引线。UniPonar具有8个引线将促进两个系列和并联连接,而具有五个引脚或六个引线的电机具有定子线圈串联连接。单极电机的操作可以简化,因为在操作它们的同时,不需要反转被称为双丝电动机的驱动电路内的电流流动。
在双极步进电机中,对于每个杆,有一个绕组。供应方向需要通过驱动电路改变,使其变得变得复杂,因此这些电机被称为单机电机。
通过不同时钟脉冲进行步进电机控制
步进电机控制电路是一种简单且低成本的电路,主要用于低功耗应用。该电路如图所示,由555个定时器IC组成,作为稳定的多振动器。通过使用给定的关系来计算频率。
频率= 1 / t = 1.45 /(RA + 2RB)C其中Ra = Rb = R2 = R3 = 4.7千克欧姆和C = C2 =100μF。
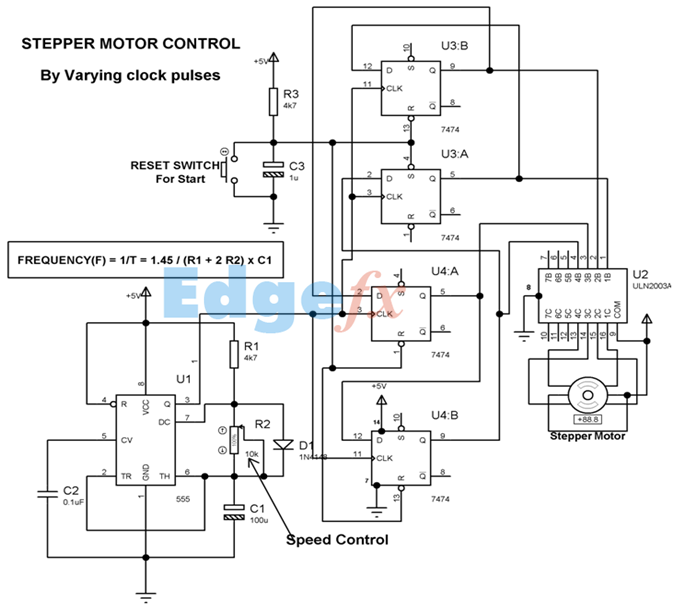
计时器的输出用作配置为环形计数器的两个7474双DUAL'触发器(U4和U3)的时钟。When power is initially switched on, only the first flip-flop is set (i.e. Q output at pin 5 of U3 will be at logic ‘1’) and the other three flip-flops are reset (i.e. the output of Q is at logic 0). On receipt of a clock pulse, the logic ‘1’ output of the first flip-flop gets shifted to the second flip-flop (pin 9 of U3).
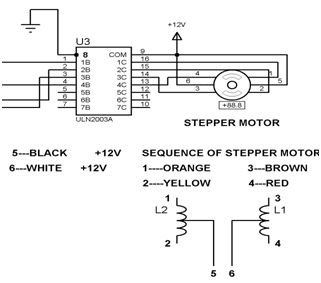
因此,逻辑1输出随着每个时钟脉冲循环地循环移动。所有四个触发器的Q输出都是通过ULN2003(U2)内的Darling-TYN晶体管阵列放大,并连接到步进电机绕组橙色,棕色,黄色,黑色至16,15,14,13,uln2003和红色+ ve供应。
该绕组的公共点连接到+12V直流电源,该电源也连接到ULN2003的引脚9。用于绕组的颜色代码可能因制造而异。当电源被切断后,控制信号连接到设置的第一个触发器和CLR针销其他三个人字拖是活跃的“低”(因为R1-C1组合形成的上电复位电路)设置第一个触发器和重置其余三人字拖。
在重置时,IC3的Q1会“高”,而所有其他Q输出都会“低”。通过按复位开关可以激活外部复位。通过按下复位开关,可以停止步进电机。通过释放复位开关,电动机再次开始旋转相同的方向。
步进电机和伺服电机之间的差异
伺服电机适用于高扭矩和速度应用,而步进电机不太昂贵,所以使用高保持扭矩,使用低至介质的加速度,打开的封闭环操作灵活性。步进电机和伺服电动机之间的差异包括以下内容。
| 步进电机 | 伺服电机 |
| 以离散步进方式运动的电机称为步进电机。 | 伺服电机是一种连接在编码器上提供速度反馈和位置的闭环电机。 |
| 步进电机用于控制和精度是主要优先考虑的地方 | 伺服电机使用速度是主要优先级的位置 |
| 步进电机的整体杆计数范围为50到100 | 伺服电机的整体杆数为4到12 |
| 在闭环系统中,这些电机以一致的脉冲移动 | 这些电机需要编码器来更换脉冲以控制位置。 |
| 扭矩速度较低 | 扭矩高速低 |
| 整个短程中的定位时间更快 | 整个长程中的定位时间更快 |
| 惯性高容差运动 | 惯性的低容差运动 |
| 该电动机适用于皮带轮和皮带等低刚性机构 | 不适用于较低刚性机制 |
| 响应性高 | 响应性很低 |
| 这些是用于波动载荷 | 这些不用于波动负载 |
| 不需要调整增益/调谐 | 需要调整增益/调谐 |
步进电机VS直流电机
步进器和直流电动机都用于不同的工业应用,但这两个电机之间的主要差异有点混乱。在这里,我们在这两个设计之间列出了一些常见的特征。下面讨论每个特征。
特征 |
步进电机 | 直流电机 |
| 控制特性 | 简单,使用微控制器 | 简单,没有额外的要求 |
| 速度范围 | 转速从200转到2000转 | 温和的 |
| 可靠性 | 高 | 温和的 |
| 效率 | 低的 | 高 |
| 扭矩或速度特性 | 速度较少的最高扭矩 | 低速下的高扭矩 |
| 成本 | 低的 | 低的 |
步进电机的参数
步进电机参数主要包括步骤角度,每个旋转的步骤,每个秒的步骤和RPM。
步角
步进电机的步进角可以定义为电动机转子一旦给予定子的输入时电机转子转动的角度。电动机的分辨率可以定义为电动机的步数和转子的转数。
分辨率=转子的步数/旋转数量的数量
电动机的布置可以通过梯度角来决定,它在度数范围内表示。电机的分辨率(步骤编号)是否。在转子的单一旋转内制造的步骤。当电动机的梯度角小时,该电动机的布置是高分辨率的。
通过该电机排列物体的准确性主要取决于分辨率。分辨率越高,精度越低。
一些精度电机可以在单一的旋转内创建1000个步骤,包括0.36度的步进角。典型电动机包括每个旋转的200步的1.8度的平方角度。在正常电动机中,不同的步进角度如15度,45度和90度非常常见。角度可以从两个到六个变为六,并且可以通过开槽杆部件实现小的步长。
每次革命的步骤
每个分辨率的步骤可以定义为总旋转所需的步进角数。该公式为360°/步骤角度。
每一秒的步骤
这类参数主要用于测量一秒钟内所覆盖的步数。
每分钟革命
RPM是每分钟的革命。它用于测量旋转的频率。因此,通过使用此参数,我们可以在单一分钟内计算转数。步进电机参数之间的主要关系如下。
每个秒的步骤=每分钟旋转x每革命/ 60的步数
步进电机与8051微控制器接口
步进电机与8051的接口非常简单,使用三种模式,如波驱动,全步进驱动和半步进驱动,给电机的四根线的0和1,我们必须选择哪种驱动模式来运行该电机。
其余两根电线必须与电压电源连接。这里使用单极步进电机,线圈的四端使用ULN2003A连接到微控制器2端口的主要四个引脚。
这个微控制器不能提供足够的电流来驱动线圈,所以电流驱动IC喜欢ULN2003A。ULN2003A必须使用,它是7对NPN达林顿晶体管的集合。达林顿对的设计可以通过连接两个双极晶体管来实现最大电流放大。
在ULN2003A驱动器IC中,输入引脚为7,输出引脚为7,其中两个引脚用于电源和接地端子。这里使用4个输入和4输出引脚。作为ULN2003A的替代方案,L293D IC也用于放大电流。
您需要非常小心地观察两个公共电线和四个线圈线,否则步进电机不会转动。这可以通过测量通过万用表的电阻来观察到,但是万用表不会显示电线两相之间的任何读数。一旦公共电线和其他两根电线处于等相,那么它必须显示出类似的电阻,而类似相位的两个线圈完成点将展示与常见点之间的电阻相比的双电阻以及一个端点。
故障排除
- 故障排除是检查电机状态是否正常工作的过程。下面的检查表用于对步进电机进行故障排除。
- 首先,验证电路的连接和代码。
- 如果可以,然后验证电机得到适当的电压供应,否则它只是振动而不是旋转。
- 如果电压供应良好,则验证四个线圈的端点,该端点与ULN2003A IC相结合。
- 首先,发现两个一般端点并将其固定到12V电源,然后将残留的四个电线固定到IC ULN2003A。直到步进电机开始,尝试所有可能的组合。如果连接不正确,那么该电机将振动代替旋转。
步进电机是否连续运行?
通常,所有电机连续运行或旋转,但是当您尝试限制电动机的轴时,大部分电机都无法停止,当您在电源下电源时,它将燃烧或破坏。
或者,步进电机设计用于制作离散步骤,然后在那里等;再次呆在那里。如果我们想在再次踩踏之前使电动机停留在一个位置较短,那么它将连续旋转。这些电机的功耗高,但功耗主要发生,一旦电动机停止或设计,那么有机会过热。由于这个原因,一旦电动机处于保持位置较长时间,电动机的电流供应经常降低。
主要原因是,一旦电动机旋转,它的输入电力部分可以改变为机械动力。2021欧洲杯足球竞猜官方平台当电动机在旋转时停止时,所有输入功率都可以在线圈内部的内部改变为热量。
好处
这步进电机的优点包括以下这些。
- 坚固耐用
- 简单的建筑
- 可以在开环控制系统中工作
- 维护很低
- 它适用于任何情况
- 可靠性高
- 电动机的旋转角度与输入脉冲成比例。
- 电机在静止时具有完全扭矩。
- 由于良好的步进电动机具有3-5%的步骤的精确定位和可重复性,并且该误差从一个步骤到下一个误差是非调节。
- 对起动,停止和逆转的良好反应。
- 非常可靠,因为电机中没有接触刷。因此,电动机的寿命简单地依赖于轴承的寿命。
- 电机对数字输入脉冲的响应提供开环控制,使电机更简单,更昂贵地控制。
- 可以通过直接连接到轴的负载来实现非常低速同步旋转。
- 随着速度与输入脉冲的频率成比例,可以实现各种旋转速度。
缺点
这步进电机的缺点包括以下这些。
- 效率很低
- 电机的扭矩将速度快速下降
- 精度低
- 反馈不用于指定潜在的错过步骤
- 朝向惯量比的小扭矩
- 非常嘈杂
- 如果不正确地控制电机,那么就会发生共振
- 该电机的操作在非常高的速度下并不容易。
- 需要专用的控制电路
- 与直流电机相比,它使用更多的电流
应用程序
这步进电机的应用包括以下这些。
- 工业机器- 步进电机用于汽车仪表和机床自动化生产设备。
- 安全- 用于安全行业的新监控产品。
- 医疗的-步进电机用于医疗扫描仪,采样器,也发现在数字牙科摄影,流体泵,呼吸器和血液分析机械。
- 消费类电子产品- 用于自动数码相机对焦和缩放功能的摄像机中的步进电机。
并且还具有业务计算机应用程序,计算机外设应用。
因此,这一切都是关于步进电机的概述喜欢结构、工作原理、差异、优缺点及其应用。现在你已经有了一个想法的类型的超级电机和他们的应用,如果你有任何关于这个主题或电气和查询2021欧洲杯足球竞猜官方平台电子项目留下下面的评论。
图片来源
- 步进电机CST.
分享这个帖子:



如何只旋转步进电机只需90度并停止
嗨Nagaraju.
如果您想得到90度,只需编写您的程序即可发送50步即可。只要您不超过电机规格,电机的速度就取决于您的程序发送步骤的快速。
你好,
我只想知道,如果步进电机相对于输入脉冲移动到其位置,并且有人意外地将其手动移动到随机位置。它会恢复到实际位置吗?
嗨哈扎
如果步进手动操作,则锁定。手动操作不应移动轴。
请添加本文的发布日期
它对学生有用,它有关于电气的完整信息2021欧洲杯足球竞猜官方平台
非常知识渊博的描述,我想获得你理解的电路图