
挑选n个地方机器人
拾取和放置机器人是用于拾取物体并将其放置在所需位置的机器人。它可以是一种圆柱形机器人,提供水平,垂直和旋转轴的运动,是提供两个旋转和一个线性运动的球形机器人,铰接机器人或斯卡拉机器人(固定机器人,具有3个垂直轴旋转臂)。
好处
在进一步移动之前,让我们看到挑选和放置机器人是首选的几个原因:
- 与他们的人类同行相比,它们更快,可以在几秒钟内完成工作。
- 它们灵活,具有适当的设计。
- 他们是准确的。
- 他们提高了工作环境的安全,实际上永远不会累。
挑选的部分地机器人

让我们看看选择和放置机器人实际上包括:
- 漫游者:它是由圆筒或球体,关节和链接等若干刚体组成的机器人的主体。它也被称为操纵器。
- 终点效应:身体连接到罗孚的最后一个接头,用于抓握或处理物体的目的。它可能是一个类比人类的手臂。
- 执行器:他们是机器人的司机。它实际上可以致力于机器人。它可以是伺服电机,步进电机或气动或液压缸的任何电动机。
- 传感器:它们用于感知内部以及外部状态,以确保机器人整体上滑。传感器涉及触摸传感器,IR传感器等。
- 控制器:它用于基于传感器反馈控制致动器,从而控制每个关节的运动,并最终终端执行器的运动。
基本选择的工作机器人:
a的基本功能挑选机器人由其关节完成。关节类似于人的关节,并且用于加入机器人中的两个连续刚体。它们可以是旋转接头或线性接头。要将联合添加到机器人的任何链接,我们需要了解该身体部位的自由度和运动程度。自由度实现了身体的线性和旋转运动和运动程度意味着身体可以移动的轴线。
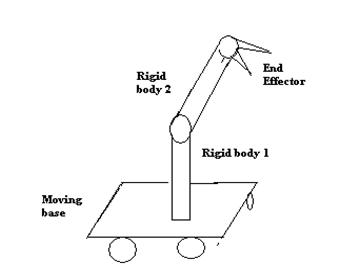
一个简单的挑选和放置机器人由移动底座上的两个刚性体组成,与旋转接头一起连接。旋转接头是一个在任何一个轴线周围提供360度的旋转。
- 底部或底座安装有提供线性运动的轮子。
- 1英石刚体固定并支撑末端执行器的第二刚体。
- 2n刚体在所有3个轴上提供运动,并且具有3度的自由度。它连接到1英石具有旋转接头的身体。
- 最终效应器应容纳所有6度自由,以便到达组件的所有侧面,从而占据任何高度。
总的来说,基本挑选和放置机器人如下工作:


- 基座下方的车轮有助于将机器人移动到所需位置。
- 支撑端部执行器的刚性主体弯曲或伸直以达到放置物体的位置。
- 末端执行器通过强大的握把拾取物体,并将其放置在所需位置。
现在我们已经简要了解了挑选机器人,基本问题是它实际控制的方式。
可以通过控制其末端执行器的移动来控制简单的拾取和放置机器人。该运动可以使用液压运动,即在压力下使用液压流体到驱动机器人,或者使用气动运动,即使用加压空气引起机械运动。然而,最有效的方法是使用电机提供所需的运动。必须控制电动机以便为机器人和末端执行器提供所需的运动。
控制选择N Place机器人的工作示例
如何用键盘上的几个按钮控制机器人?是的,有可能!只需按所需的按钮,我们可以将命令传输给机器人以使其在任何方向上移动以实现我们的任务。此外,这可以使用简单的无线通信来实现。
让我们看看这实际上是如何工作:
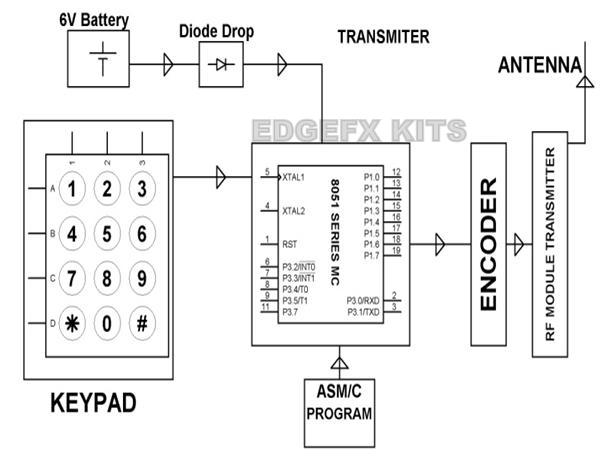
发射器部分由键盘组成,键盘接口到微控制器。通过小十进制格式的按钮编号由微控制器转换为4位二进制文件,并将其一个端口处的并行输出应用于编码器。编码器将该并联数据转换为串行数据,并且这被馈送到发射器,配备有天线以传输串行数据。
接收器侧由接地到微控制器的解码器组成。解码器以串行格式将接收的命令转换为并行形式,并将此数据提供给微控制器。基于该命令,微控制器将适当的输入信号发送到电机驱动器以驱动各个电机。
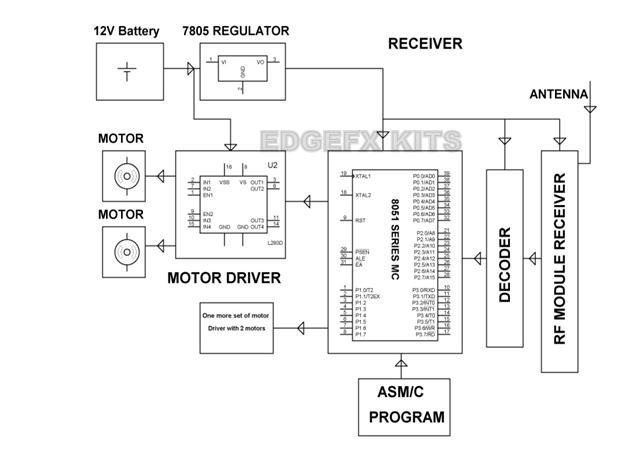
该系统由两个电动机组成,用于向整个机器人和另外两个电动机提供运动,以提供臂运动。需要控制末端效应器或夹具以对物体对物体施加适当的压力,以便为其提供柔软握把。通过正确的命令通过控制ARM电机来确保这一点。臂电机的输出连接到10OHMS / 2W电阻器,在电动机上的时,在负载或锁定状态时,在电阻器上开发高电压,这会在光学器的输出和中断处引起逻辑高电平通过PNP晶体管输出的光学控制器连接的微控制器获得逻辑低信号,可停止夹具的所有其他操作。
因此,通过简单的RF通信,我们实际上可以控制挑选机器人。
拣选和放置机器人的实际应用:
- 防御应用:它可用于监控,也可以拿起像炸弹这样的有害物体并安全地扩散。
- 工业应用:这些机器人用于制造,拿起所需的部件并将其放置在正确的位置,以完成机械夹具。它还可以用来放置在输送带上的物体以及从输送带拾取缺陷的产品。
- 医疗应用:这些机器人可以在各种外科手术中使用,如联合替代操作,矫形和内部手术操作。它以更精度和准确性执行操作。
除这些应用外,这些机器人还可以用于适合于人类的各种其他应用中使用。
现在问题仍然存在 - 机器人将完全缓解人类的方式有多远?
分享这个帖子:




你好,我想做挑选的主要项目,并通过Robo编程来挑选机器人,你可以帮助我。
先生请告诉我购买挑选机器人
你能告诉我..使用微控制器来做Pic和将机器人项目放置多少成本......?
你好
我想在IoT上做项目
你可以帮我。
请有人告诉我如何,我的意思是在数学上,你详细说明了控制臂电机的信号..
谢谢你。
马诺洛
PLZ可以告诉我如何从机器人和PLACR中挑选一个没有无线通信的桥梁填充的普通盒!
你可以吗
请提及费用
我需要编码颜色分拣挑选和放置机器人
请更新颜色检测程序,因为我正在使用Android控制的挑选和放置机器人手臂与Colur检测
嘿…。
我想制作一个可以拾取和放置块的机器人......
如果你能够帮助我,请邮寄我的电子邮件。
发送挑选和放置机器人的价格
PLZ为Pick N Palace发送基本纸...... ..我GNG为我的最后一年做的项目