
如何使用Arduino和8051微控制器构建机器人
在现代世界,机器人将发挥重要作用。机器人的主要目的是减少人力。机器人在许多应用中用于电子产品。在本文中,我们讨论了如何使用Arduino模块和8051微控制器构建机器人。与Arduino建立一个机器人,我们正在通过避免避免的Arduino机器人解释。所需的组件包括机器人体,直流电机,超声波传感器,Arduino模块,电机驱动器IC和Arduino模块
如何建立机器人?
这需要组件构建机器人包括以下内容
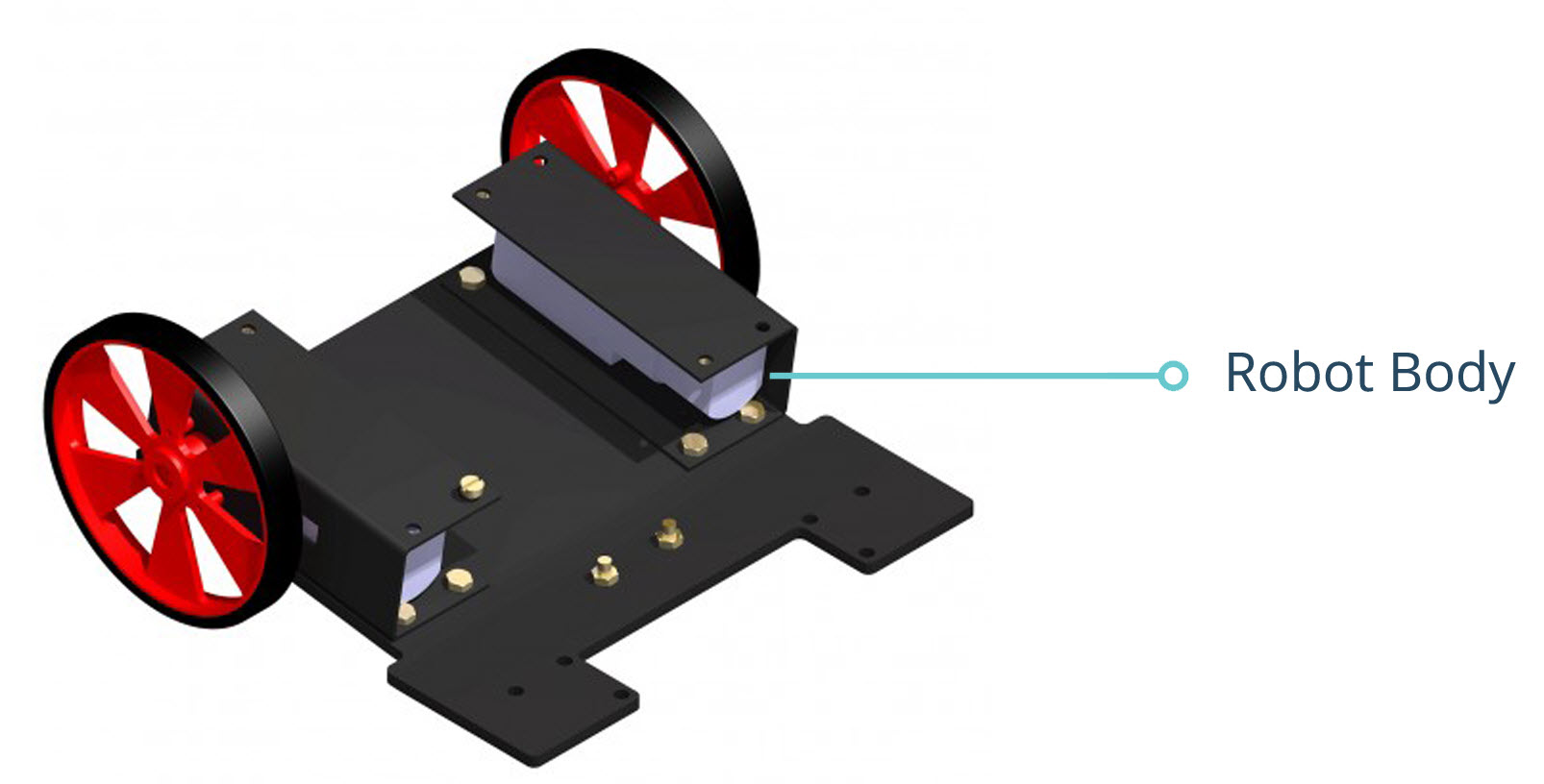
机器人身体
基本的机器人体避免障碍物的机器人显示在以下图像中。机器人身体是塑料体,它含有两侧的轮子。在机器人身体前面,布置超声波传感器。通过使用超声波传感器,障碍物可以检测。当机器人正在移动时,如果通过超声波传感器检测到任何障碍物,那么机器人将移除并继续移动。
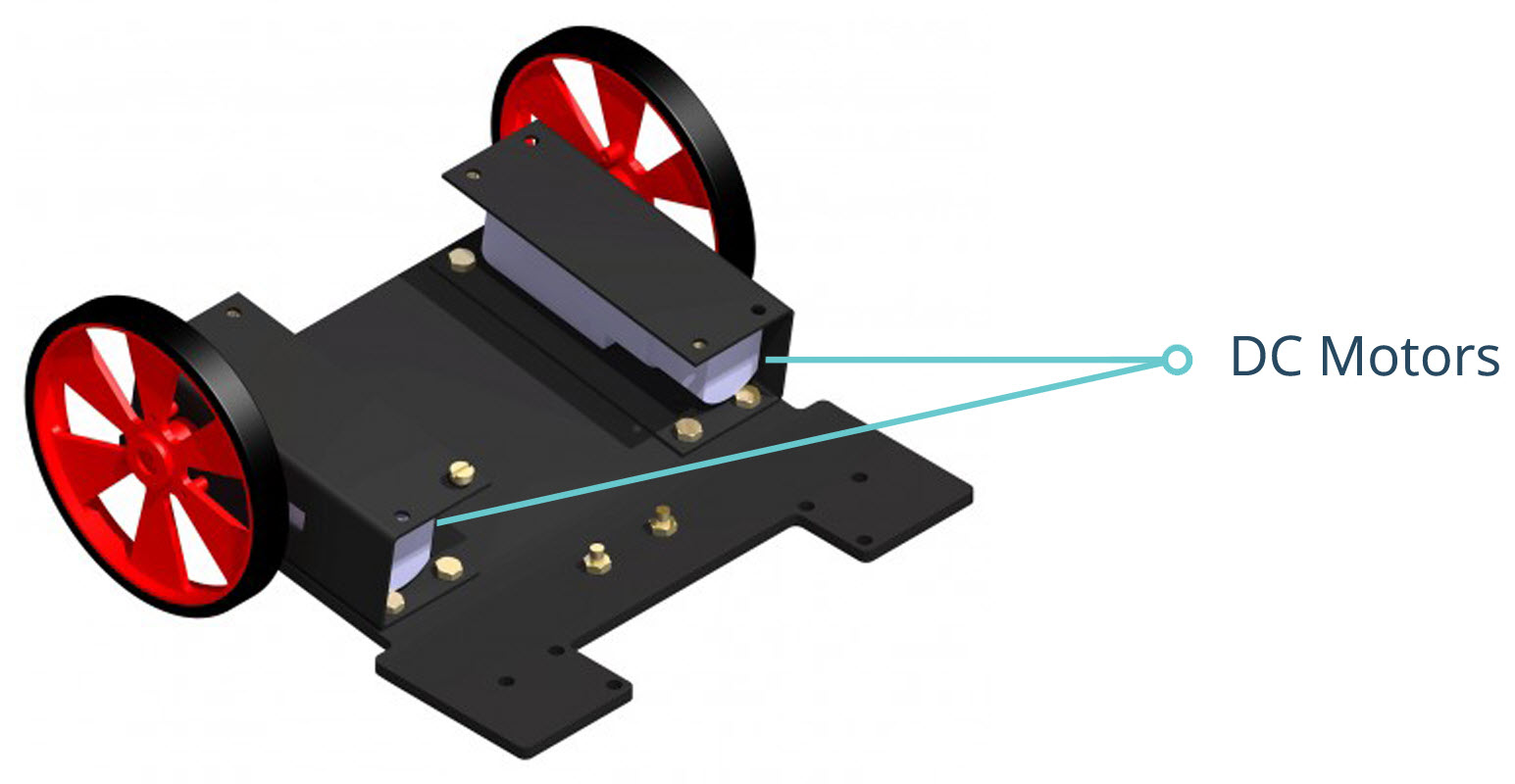
直流电机
这直流电机是电动机它以直流电力运行。任何电动机的操作都基于电磁。当它被放置在外部磁场中时,磁场由电流承载导体产生,它将经历与导体中的电流成比例的力。总之,我们知道磁体与南部的极性吸引力相反,如果极性与北北朝向南部的极性也是如此,然后磁铁会被击退。
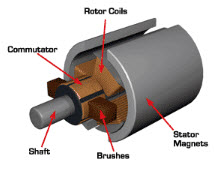
DC电动机的内部配置被设计为在电流承载导体和外部磁场之间的磁相互作用以产生运动。在此,我们使用的是两个直流电动机,每个电机包含6V,总两个DC电机包含12V。两个直流电动机放置在机器人体中,我们可以在以下图像中观察到。在直流电动机的帮助下移动机器人身体
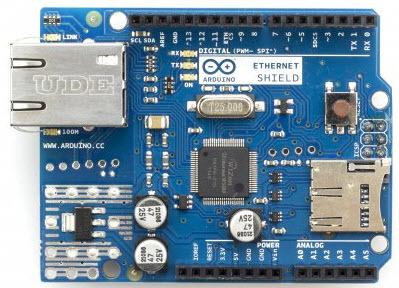
Arduino模块
以下图像显示了Arduino模块图像。这Arduino模块在使用Arduino套件的障碍物避免机器人的设计中起着重要作用。Arduino的接收器销连接到超声波传感器的第二个引脚,并且Arduino模块的第1,第2和第3销连接到DC电动机驱动器。常用元件电容器和二极管在电池电源的帮助下也连接到Arduino模块。
电机驱动器IC
运行直流电机电机驱动器IC用过的。电动机驱动器的引脚3,6和11,14连接到DC电动机。输入引脚1和2连接到Arduino模块,使能引脚连接到Arduino的发射机销。电动机驱动器的引脚4,5,12,13连接到地面。

超声波传感器
在这个概念中超声波传感器用于检测前方的障碍,它将向Arduino板发送命令。根据输入信号,微控制器将机器人重定向以在交替方向上移动。

Arduino机器人障碍避免的应用
- Arduino机器人可以在任何表面上移动
- 它可以在金属表面上移动,如冰箱机身。
下面的形象显示了避免障碍物的Arduino机器人

建立一个机器人8051微控制器我们正在解释金属探测器机器人车辆。使用8051微控制器构建机器人所需的组件是
- 8051微控制器
- 直流电机
- 电机司机
- 金属探测器
- 解码器
- 编码器
- 按按钮
- 水晶
- RF发射器和接收器
金属探测器
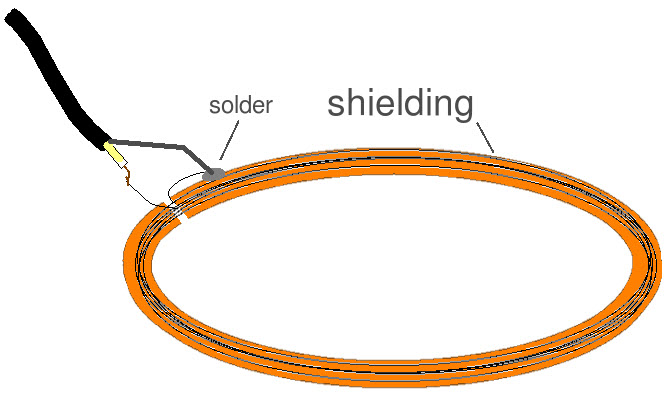
这金属探测器线圈是否具有用于检测地面上的金属的一个或多个金属线圈。金属探测器适用于电磁感应的原理。金属检测器通过PCB连接到机器人体,我们可以在最后一张图像中观察到。以下图像显示了电子项目中使用的一般金属探测器。
按按钮
按钮是按钮,由塑料和金属等硬质金属组成。通常,按钮用于重置微控制器中的程序。以下图像显示按钮图像。

8051微控制器
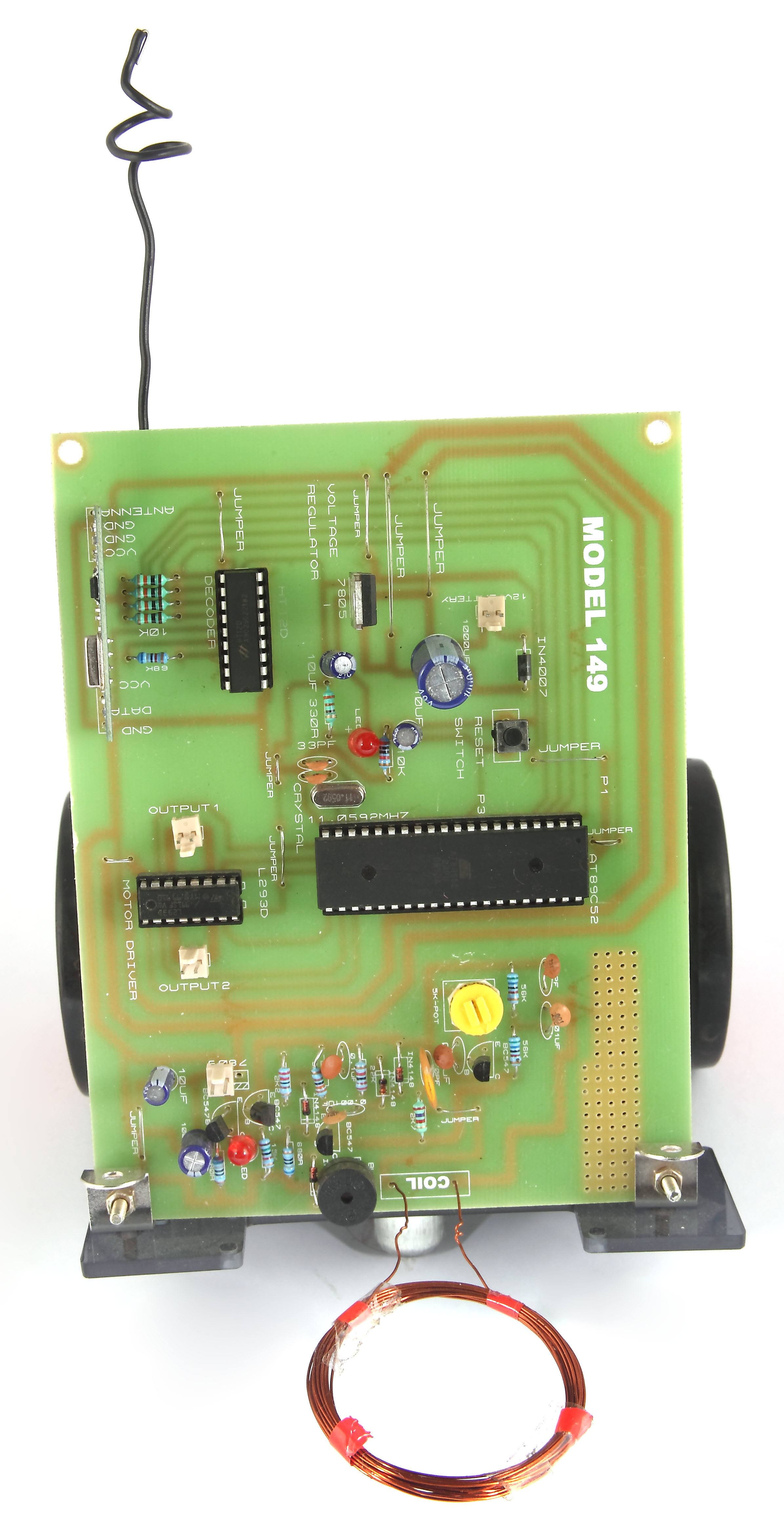
这8051微控制器由40个引脚组成。微控制器的第4销钉连接到晶体振荡器。VCC引脚提供5V的电源,接地销连接到地面。微控制器的引脚15,16,18,19连接到HT12E的编码器IC。微控制器销2,7,8,9连接到按钮。
在连接电阻器,电容器,晶体振荡器,8051系列微控制器,编码器等的所有组件后,下面的图像印刷电路板。
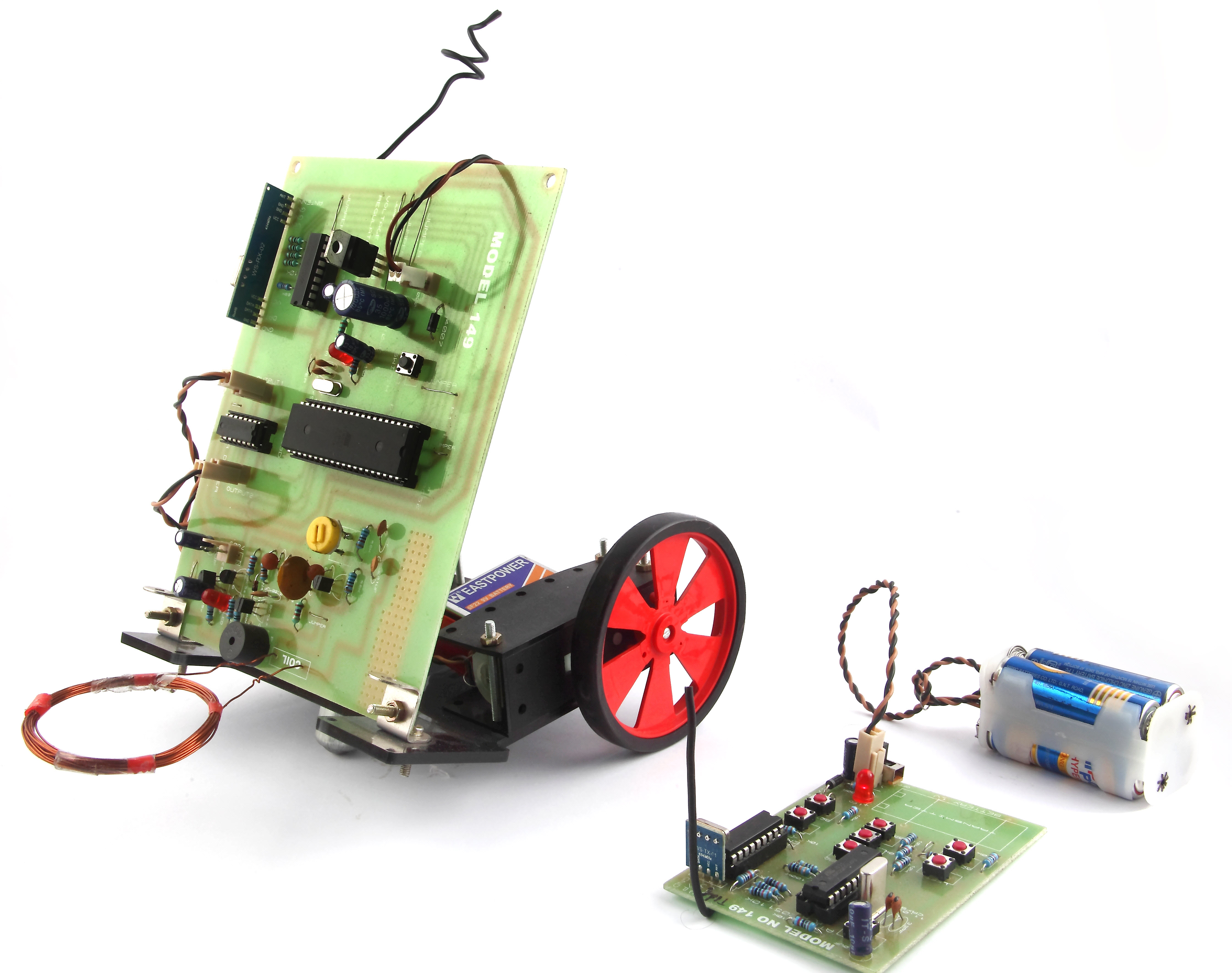
以下图像显示了带有8051系列微控制器的金属检测器机器人。
在本文中,我们讨论了关于该的如何使用Arduino和8051微控制器构建机器人。我希望通过阅读本文,您已获得一些基本知识来构建机器人。如果您对本文或关于电子产品有任何疑问通信项目,请随时评论以下部分。这是你的问题,什么是8051系列微控制器?
。
分享这个帖子:
你好,
你能把视频推出如何构建这个机器人
嗨Nihar.
抱歉通知您,我们不能为您提供这样
你好。我想知道如何制作人类检测机器人。
我想要行程和代码。
我可以在哪里得到这些部分。我想知道传感器及其工作。
我可以在哪里得到这些潜水的备件
兄弟我对BJT和MOSFET有一个问题,为什么BJT是电流控制,MOSFET是电压控制装置。
嗨Husnain.
在JFET和MOSFET等FET设备中,输出可以根据IDS-CLUST定义,而在BJT中,可以在仅在IC-CLUST方面定义输出。这意味着输出由FET的电压和BJT的电流控制。
请告诉我如何编码8051微控制器