
用于危险情况下的消防控制机器人
机器人在工业、军事、家庭等领域都有广泛的应用。机器人的主要用途之一是人类的资产。无论是任何类型的危险情况,如火灾爆发或充满地雷的地方,机器人可以很容易地解决这些问题。让我们看看这两种类型的机器人-地雷感应机器人和消防机器人
地雷感应机器人
如何用机器人感应地雷?
机器人技术最重要的应用之一是国防。欧洲杯四强竞猜平台军队中的机器人是一种具有许多独特特点的遥控车辆。它可以是带摄像头进行间谍活动的机器人车辆,带激光枪探测并摧毁目标的机器人车辆,或者带金属探测器探测是否有地雷。
探测地雷的传统和传统方法之一是使用训练有素的人员,使用金属探测器手动搜寻金属或地雷。然而,这既不安全,又昂贵,而且速度慢。
为了解决这个问题,一个更先进的系统是首选。
探测地雷的几种方法:
- 使用一个机器人,它可以把一个探针插入地面,可以探测到土壤下面的物体,并确定材料的类型。
- 使用带有金属探测器的机器人,它可以感知到像地雷这样的导电元素的存在,并向用户发出警报。
在详细介绍第二种类型即带金属探测器的机器人之前,让我们简单回顾一下两个重要的术语-地雷和金属探测器。
一个地雷是一种故意放置在地下的爆炸装置,当压力触发时爆炸。根据一份统计报告,全球70个国家约有1亿枚地雷。一枚地雷一旦埋设可工作50年。不是很危险的! !

一个基本的金属探测器是根据法拉第感应定律原理工作的。它由一个线圈组成,线圈被赋予能量,在其周围形成一个脉动磁场。当线圈靠近金属(矿井)之类的导电元件时,就会产生电流(涡流)。感应涡流引起金属周围电磁场的发展,再传送到线圈,线圈产生电信号并进行分析。线圈与金属之间的距离越大,磁场越弱。
一个简单的原型:

设计机器人:
机器人车辆由以下单元组成:
- 矩形底座支撑整个机器人结构,并附有两个轮子进行运动。
- 一对直流电机为机器人提供所需的运动。
- 一种由射频接收器组成的控制单元,该接收器接收来自发射机单元的命令信号以控制电机驱动器并相应地控制电机。
- 一旦金属被探测到,就会触发金属探测器电路和蜂鸣器报警。
机器人的工作原理:
该金属探测器电路嵌入在机器人控制电路中,由一个由线圈组成的调谐振荡器电路驱动的晶体管构成。当检测到一种金属,电流通过线圈重新传输时,晶体管1处于状态,并驱动另一个晶体管2关闭状态。这个晶体管又反过来驱动另一个晶体管进入关闭状态。这个特殊的晶体管3被连接到另一个晶体管4,这样当它的驱动晶体管3处于关闭状态时,它就处于状态。将晶体管4连接起来,使蜂鸣器和LED处于适当的偏置并开始导电。

LED开始发光,蜂鸣器开始响。因此,当检测到金属时,蜂鸣器警报将开始响,LED将发光。
控制机器人:
简单的原型可以使用射频通信来控制,这是一种短程通信系统。通过发射器发送指令,并通过嵌入在机器人电路中的接收器接收指令,以控制机器人的运动。

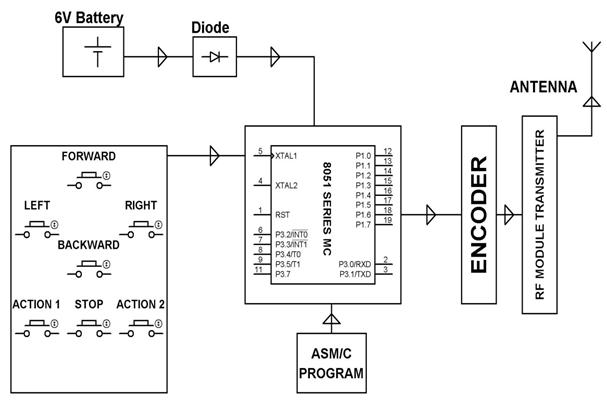
传送器由一组按钮组成,如前进、后退、停止、向左和向右,按下这些按钮可以提供机器人在任何想要的方向上的运动。按钮连接到微控制器的输入端口。微控制器在接收这些信号时,通过另一个I/O端口并行地开发相应的4位信号,编码器IC与该端口相连。编码器将这些信号转换为串行形式的数据。射频发射机调制这个串行数据,通过天线传输。

安装在机器人上的接收器部分包括射频接收器,用于解调该信号。解码器IC以串行形式接收该信号,并在其输出处开发相应的4位并行数据。单片机接收到这些数据,并提供相应的控制信号给电机驱动芯片LM293D,驱动两个电机。
消防机器人车:
的概念消防机器人车正在救火。近年来发生了几起包括火灾和炸弹爆炸在内的严重事故。我们已经知道,重大火灾事故如核电厂,石油,气罐,和化工厂,大型火灾工业公司在这个地方一旦开始火灾,可以造成非常严重的后果。成千上万的人在这个事件中死亡。那是一场火灾水下机器人技术。这种机器人车辆用于寻找火灾和灭火。

消防机器人车工作原理:
装有水罐车的机器人车辆。该泵浦采用无线通信(RF和移动通信)控制。发送端连接到按钮。使用这个按钮命令被发送到接收器,并控制机器人的前进,后退,左右。接收端有三个电机与单片机相连。

射频发射机在200米范围内作为射频遥控。在家庭、办公室和工业中,当火灾传感器附近发生火灾时,将火灾传感器放置在特定的地方。传感器是一种感觉,相应的比特被发送到射频接收器。射频接收器集成了一个微控制器。当射频接收器接收到信号,信息正在传递给微控制器,机器人正在向火灾传感器移动。传感器的位置存储在微控制器中。一旦机器人到达目标位置,机器人就会停止并激活喷雾器。点火后,机器人回到初始位置。整个电路由单片机控制。
消防机器人车辆类型:
家庭消防机器人车辆:
现场行动是限制在当前的弗洛雷的房子。这个机器人正在使用许多家庭用品在有人睡觉或外出时着火。这个机器人是用来保护家庭的,使用这个应用程序,弗洛尔所有的门都是打开的,因为这辆车在家里从一个地方移动到另一个地方。消防区域必须是安全的,不能造成新的事故。这个机器人的另一个特点是可以远距离操作。
工业消防:
大多数工业都面临火灾事故的问题,如天然气,汽油,核电站,化学工业巨大的损失和更多的人死于附近地区。这个机器人有力量携带火在燃烧区域内提供无限的水。火灾会导致能见度降低,极端高温,以及更多可能导致受伤的情况。
森林消防:
森林火灾是非常危险的。它可以在很短的时间内燃烧大量的森林区域。甚至城市消防部门也要处理城市周边地区的森林火灾。几年前,在20世纪90年代,大约有152名消防员丧生。森林火灾机器人被用来救火和灭火。欧洲杯四强竞猜平台该机器人使用外部控制装置进行无线通信。所述模块与所述输出端相连,用于机器人的森林灭火。压力传感器、温度传感器、烟雾传感器、红外传感器等应用于森林灭火机器人的控制。
la提示!
虽然我已经给出了一个带金属探测器的机器人的基本概念,但是一个主要的问题仍然存在——如何在不平坦的地形上引导机器人,特别是在大雨、灰尘和高温的环境中。找到答案并发表你的评论。
分享这篇文章:




先生,我需要这个项目的完整编程代码和这个项目的完整电路图。先生,请帮我做这个项目。
我想要消防机器人车的完整项目