
面向工程专业学欧洲杯四强竞猜平台生的最新机器人项目构想
机器人是一种智能机械装置,最早的机器人是由“捷克剧作家卡雷尔·恰佩克”在1920年制造的。欧洲杯四强竞猜平台机器人技术是工程学的一个分支,涉及设计、创造和操作。机器人技术这个词是欧洲杯四强竞猜平台由机器人这个词衍生而来的。目前,机器人的种类很少,有串行型、并行型、步行型和移动型。机器人部分主要包括电源、控制器、抓欧洲杯四强竞猜平台手、机械手和末端执行器。当我们想到一个机器人时,我们脑海中最重要的因素就是它会模仿某些人。然而,在现实中,机器人并没有真正的定义。但是,机器人应该具备一些基本特征,比如智能、感知、能量和运动能力等。有些机器人自己工作来完成特定的任务。但是,替代机器人需要人类的帮助。 As a result, these robots are dependent. Robotics Project Ideas are used completely in different applications like medical, space communication, and军事应用
面向工程专业学欧洲杯四强竞猜平台生的最新机器人项目构想
如今,若干工程学生对机器人项目呈现很多兴趣。与其他相比,他们创造了很多兴趣电子项目.在教育水平中,这些机器人的项目非常受欢迎,他们是线路,挑选机器人,消防,墙轨欧洲杯四强竞猜平台道,人形和六角赛等。这些机器人工程学生的理念在做实践时会有所帮助。.因此,我们倾向于建议工程学生从这些中进行选择欧洲杯四强竞猜平台机器人套件因为这些都能够为它们运作。

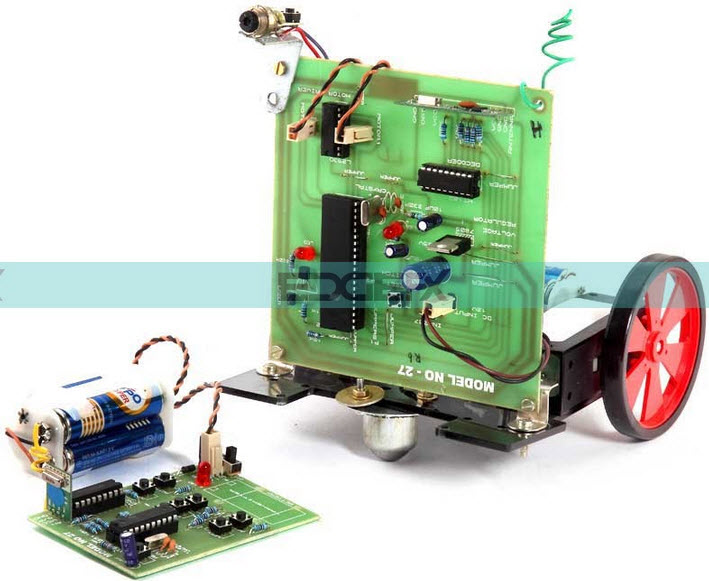
战区间谍机器人使用夜视无线照相机
该项目的主要目的是使用RF技术和无线摄像机设计机器人车辆,其中RF技术用于远程操作,无线摄像机用于监控目的。机器人以及相机可以使用夜视功能传输视频。为了间谍活动,这种类型的机器人有助于战区。一个8051微控制器用于所需的操作。
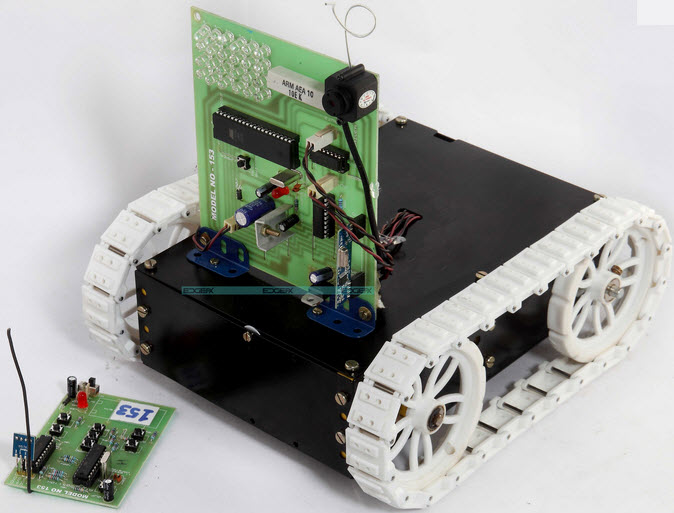
该项目使用夜视摄像机即使在暗处的地方捕获图像,并将无线传输到电视接收器单元。这些机器人用于军事应用,如将信息发送到控制单元并在敌人的土地上窥探。这个机器人是通过使用RF通信来控制使用一组按钮。
此外,本项目可以设计使用DTMF技术.利用这项技术,我们可以通过手机来控制机器人车辆。与射频技术相比,该技术在远距离通信方面具有优势。
汽车地铁火车在两个站之间穿梭
该项目的主要目标是展示在地铁火车运动中使用的技术。该项目用于许多发达国家。地铁火车配备了一个控制器,可以将火车从一个站自动运行到另一个站。
这自动轨道列车项目设有自动启停机构。这样地铁就会在特定的时间停下来,在特定的时间之后开始。它包括一个自动开门和关门的机构,并在进入列车时统计人数。
轨道传感机器人车辆运动
该项目的主要目的是设计一个跟踪特定路径的机器人。这条路径可以是白色地板上的黑色车道。轨道传感机器人车辆正在各种应用中用于自动车辆的公共场所的指南。这里,该机器人车辆由一对传感器设计,该传感器被制成在对两个电动机感测的弯曲的黑色车道上移动。
该轨迹传感机器人由两个电机、直流电源组成。这两个马达由充当开关的晶体管控制。两个传感器,每个传感器包括一个红外LED和一个光电二极管被放置在电路下。当两个传感器感应到白色地板时,电机就会相应地旋转。
在转动时,在遇到黑路径上,其中一个电机停止旋转传感器的输入。当IR LED在白色地板上产生光时,传感器的工作原理,然后它被反射。当反射光在光电二极管上掉落时,它降低其对控制电动机开关的导通的电阻。
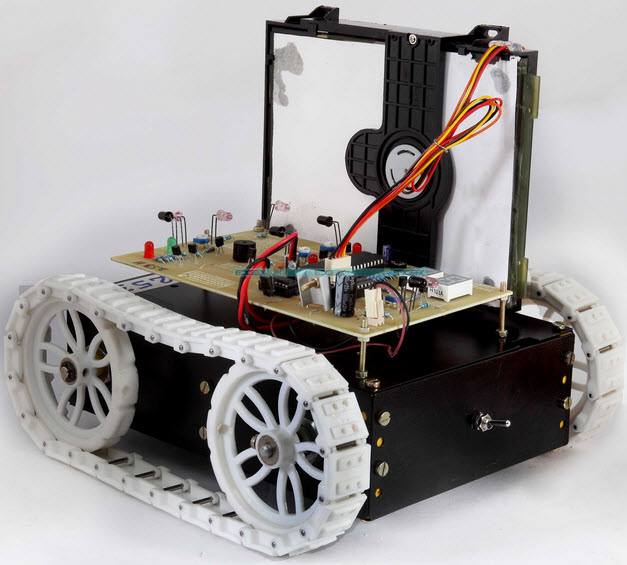
金属探测器机器人车辆
本项目的主要目标是设计一种探测金属和地雷的机器人车辆。地雷是埋在地下的不稳定装置,用金属探测仪探测地雷是很危险的。在本课题中,机器人中嵌入了金属探测器,并通过射频通信进行控制。
在发射器端,按钮的数量是界面到微控制器R在特定运动中运行机器人。按下按钮时,将信号发送到微控制器,单个数据库将二进制数据发送到按钮。编码器用于将并行数据转换为串行数据,并且使用RF模块发送该命令。
在接收器端,该信号由解码器解码。基于该信号,微控制器将相关信号与电动机驱动器提供动力驱动电机。因此,机器人以所需的运动移动。金属检测器嵌入在检测金属的机器人电路中,并通过使用蜂鸣器给出指示。
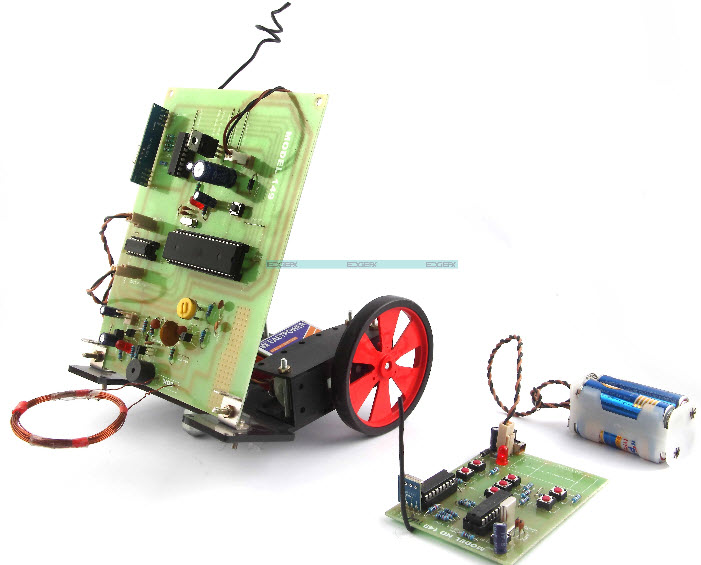
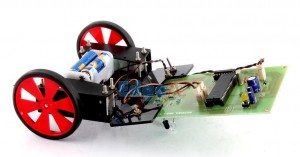
RF控制机器人车辆具有激光束装置
本课题旨在利用射频技术控制机器人车辆。用低功率激光界面演示了用它的光束结束遥远物体的可能性。一个8051微控制器用于所需的操作。
在发射端,使用按钮向接收端发送指令,控制机器人向右、左、前、后移动。在接收端,两个电机与微控制器相连,用于车辆的运动。
RF发射器充当RF遥控器,其具有适当的范围(最多200米)的优势,而接收器通过电机驱动器IC将其馈送到另一个微控制器以驱动DC电动机进行驱动DC电动机。
激光笔安装在机器人身体上,并且其操作通过来自发送端的适当信号从微控制器输出。使用的激光只是用于演示目的而不是强大的。
此外,可以使用该项目使用DTMF技术.利用这项技术,我们可以通过手机来控制机器人车辆。与RF技术相比,该技术具有超过长通信范围的优势。
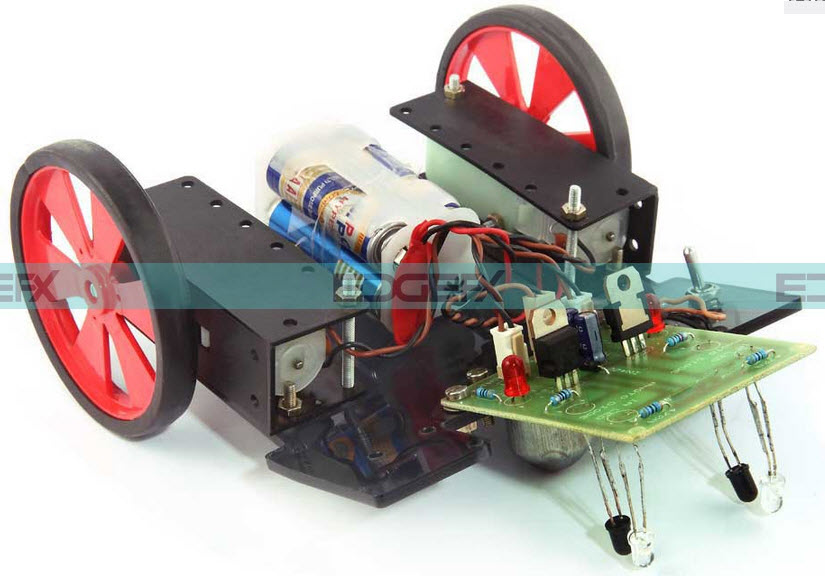
线路后线路
在机器人之后的一个线是一个机器人,它遵循它移动的某个路径。路径可以是白地板上的黑色路径或磁场。这些机器人在各种应用中被用于公共场所的指南到自动车辆。这里,开发了一种线路后的线路,其使得在由每个电动机的一对传感器感测的弯曲的黑路径上移动。这里,机器人车辆由两个电动机组成,并且使用作为开关的晶体管控制每个电动机的DC电源。
在电路下方放置一对传感器,每个传感器由一个IR LED和一个光电二极管组成。传感器感应到白色的地板,并相应地给予电机旋转。在转弯处,遇到黑路径时,其中一个电机随着传感器输入停止转动。该传感器的工作原理是,当来自红外LED的光线落在白色表面时反射,反射的光线落在光电二极管上时,降低光电二极管的电阻,从而控制电机开关的导通。
避障机器人车辆
可以通过自行检测环境或使用远程或任何其他方式来检测环境来控制机器人。在这里,开发了一个全自动的机器人,其感应为它周围的区域并相应地移动。嵌入传感器布置,其在其前方感测任何物体,因此机器人改变其方向以避免任何碰撞。这种机器人车辆可以在庇护所等的地方使用。

超声波传感器用于检测存在任何障碍物的存在。这些传感器通过传感器接收并转换为电信号的物体对超声波的反射原理工作。2021欧洲杯足球竞猜官方平台在接收任何中断信号时,微控制器因此向电动机驱动器提供适当的命令,使得电动机中的一个停止并且另一个电动机旋转,从而使机器人的方向变化。
选择带有软捕捉夹具的机器人车辆
机器人车辆可以用来捡起物体并相应地放置它们。为此,机器人由末端执行器组成,其力矩由电机控制。机器人车辆由一组使用射频通信的按钮远程控制。
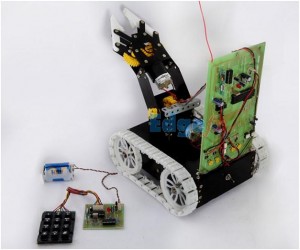
在发射器侧,键盘与微控制器接口,并且当按下相关键时,微控制器为该键生成二进制代码,并且该二进制代码被转换为串行形式并通过RF模块和RF天线发送。
在接收器中,两个电动机用于向机器人车辆提供相关的动作,另外两个电动机用于控制夹具的运动以保持任何物体并将其放置在所需的位置。从发射机发送的命令被微控制器解码并使用,以向电机驱动器IC提供适当的信号。
消防机器人车辆
机器人可以在许多危险情况下使用,就像发生火灾事故时一样。这里,这种原型是一种由带喷嘴和泵的水管组成的演示。机器人的运动以及喷嘴喷射水的喷射,远程使用一组按钮来控制,并且通过RF通信将机器人传送。

基于触摸屏的遥控机器人车辆的商店管理
在这里,开发了一个挑选机器人,其使用RF通信控制。触摸屏面板用于提供由机器人发送和接收的命令,以在所需方向上给机器人提供适当的运动并控制拾取和放置操作。
与matlab的颜色传感机器人
该项目实现了一种机器人车辆,用于使用MATLAB检测捕获图像的颜色。这个项目非常有助于减少人类的努力,同时在检测图像中的颜色。该项目可以通过使用基于MATLAB的图像处理技术来实现。该机器人具有使用Matlab的一些功能,如检测颜色,人力努力可以减少,高效,节省时间。
基于Arduino的智能手机控制机器人汽车
该项目用于构建基于Arduino的智能手机控制的机器人车。该Android手机控制机器人使用蓝牙技术控制机器人。该项目中使用的主要组件是机器人汽车,Arduino Uno,Android手机和蓝牙模块。为此,Android手机的用户必须在他们的手机上下载并安装应用程序,然后移动用户必须关闭移动设备上的蓝牙选项。
蓝牙是一种无线通信技术,在机器人的控制中起着关键作用。在这里,android手机向与机器人相连的蓝牙发送命令。这些命令是向右、向左、向前和向后移动。蓝牙接收器接收指令并将指令传递给微控制器来管理电机。然后,该微控制器将信号发送给电机驱动IC来激活电机。
欧洲杯四强竞猜平台使用Arduino的机器人项目
基于Arduino的机器人项目创意列表如下所述。欧洲杯四强竞猜平台

机器人割草机通过Arduino操作
该项目设计了一种机器人,用于通过避免障碍物在花园的指定区域中切割草。该机器人可以使用像中央控制装置的Arduino控制器通过太阳能操作。
使用Arduino Board的智能船机器人
这个简单的机器人项目是用Arduino板设计的,用于探测障碍物、灯光控制等。
用于使用Arduino寻求光的机器人
该项目用于设计机器人之后的光线。可以使用光干扰机器人的光来完成该项目的控制。因此,这种项目也被称为灯路之后。该项目可以设计与Arduino板,包括障碍物检测的能力。
雪犁机器人
该项目用于设计带有Arduino Uno的雪地机器人。该机器人通过使用从射频设备发送的命令来工作。该设备用于以所需方式控制机器人和犁的运动。
自平衡机器人
该项目的主要目标是设计平衡机器人,包括两个轮子。该项目可以使用Arduino构建,以单独的数字控制以获得稳定性。
四足机器人
本课题用于四足机器人的设计。这是一款简单且性价比高的四足机器人,包括两个通过Arduino Uno控制器控制的伺服器。
使用Arduino的机械臂
该项目实现了一个机器人臂,其具有与人臂相似的功能。这些功能可以通过臂中的程序内置的程序来实现。机器人操纵器的设计可以使用Arduino控制器完成。
omni轮子机器人
该项目实现了一个Omni轮机器人。这个机器人非常易于设计和组装。这种机器人允许新类型的动作。可以通过电机驱动电路使用Arduino板来完成该机器人的实现。
使用Arduino的机器人吸尘器
该项目设计了一个自主真空吸尘器机器人。该机器人用于清洁家庭而不会通过传感器,Arduino控制器和电机驱动器电路进行人机干扰。
未来的机器人想法
在我们的日常生活中,机器人被用于不同的分支。其中,日常生活中使用的机器人如下。日常生命科学项目中的机器欧洲杯四强竞猜平台人项目想法列表如下
- 自动驾驶机器人
- 灭罪机器人
- 国防,安全和监督的机器人
- 教育领域的机器人
- 机器人喜欢仆人
- 烹饪机器人
- 医疗领域的机器人
- 做危险工作的机器人
- 家庭维护的机器人
机械手臂项目构想
以下机器人项目的想法是基于使欧洲杯四强竞猜平台用Arduino为工程学生的机器人臂项目。

通过无线手套控制机器人手臂
本项目实现了一个使用无线手套控制机器人手部的系统。本项目可以使用Arduino Nano、电池、收发模块、伺服电机及相关传感器进行设计。
机器人手臂通过nunchck控制
该项目告诉您如何在Arduino Mega的帮助下进行编程以及装载机器人臂。与其他基于ARM的项目相比,该项目是一个不同的项目,因为它雇用了Nintendo Nunchuk来控制机器人手臂。很容易找到,便宜,包括一组传感器。
机器人手臂通过手势控制
该项目设计了一个可以通过手势控制的机器人。这里,动力传感器用于捕获手势。机器人臂的开发可以通过伺服电机来完成,该电动机可以模仿手的右臂和移动的运动。
电脑鼠标控制机器人手臂
本课题用于设计一个机械臂,该机械臂可以通过电脑上的鼠标进行控制。本课题还利用MATLAB进行图像处理,由自己决定。
Android应用控制机器人手臂
本项目主要是利用android app通过Arduino和蓝牙模块控制一个机器人手臂。本项目需要的组件有直流电机、Arduino mega、蓝牙模块(HC-05)。
以下几乎很有趣欧洲杯四强竞猜平台机器人与摘要项目的想法最后一年的工程学生。您可以通过单击“摘要”链接来获取以下机器人项目创意的框图详细信息。欧洲杯四强竞猜平台
- 具有激光束布置的RF控制机器人车辆 -抽象的.
- 线路后线路 -抽象的.
- 挑选与软捕捉夹具的地方 -抽象的.
- 使用微控制器消防机器人车辆 -抽象的.
- 射频控制机器人与夜视无线相机用于间歇在战区 -抽象的.
- 基于微控制器的线路跟随机器人车辆 -抽象的.
- 使用超声波传感器避免障碍物机器人车辆 -抽象的.
- 汽车地铁火车去班车之间的班车 -抽象的.
- IR受控机器人车辆 -抽象的.
- 手机控制机器人车辆 -抽象的.
- 金属探测器机器人车辆 -抽象的.
- 具有长距离语音识别的语音控制机器人车辆 -抽象的
- 消防机器人遥控操作的Android -抽象的
- IR受控机器人车辆 -抽象的
机器人上的迷你项目欧洲杯四强竞猜平台
迷你机器人项目的想欧洲杯四强竞猜平台法包括以下内容。这些机器人项欧洲杯四强竞猜平台目的想法对初学者来说非常有用,以及工程中的文凭学生。

炸弹检测机器人
这个机器人是用来探测炸弹在各自的地方。该机器人可由个人电脑通过无线射频操作。一旦机器人探测到炸弹,它就会发出蜂鸣声,炸弹中的破坏性物质就会发生变化,可能会对周围环境造成严重破坏。为此,提出的系统包括一个金属探测器电路。
机器人手臂通过遥控器控制
该项目实现了通过遥控器控制的机器人手臂。该机器人通过减少时间减少了人类在不同行业中的努力。这些机器人用于通过远程控制的特定任务。这里,该机器人预编程用于特定任务。该项目使用遥控器控制机器人臂。可以使用基本光电二极管通过IR接收器检测从发射器接收的红外信号。
使用遥控机器人的GSM无人育拍摄
该项目用于捕获人类图像并通过无线音频和视频发送给个人计算机以进行防御。该系统设计了使用传感器进行监视操作的轻量级和合适的系统。
传感器必须在30米的最小高度下保持高至少两分钟,以进行下面的平衡区域的成像。
必须将可识别的视频信息发送到地面的接收器点,该接收器点位于观察区域中的正确位置。所使用的传感器必须能够注意到上面提到的条件中的物体。该系统的配置包括传感器,观察,数据链路,数据处理和支持系统的机制。
机器人导航与光学造伏型
该项目设计了使用光学造管的导航机器人。自主移动机器人面临的主要问题是他们能力在周围环境中安全和持续地找到方式。
无线无人油轮机扑
本课题设计了一种用于机器人车辆的控制系统,可以通过射频和PC进行控制。在该系统中,机器人的控制可以根据红外传感器提供的反馈来完成。该传感器是物体检测电路的重要组成部分。
群机器人
这些机器人使用人工群体智能,它使用多个机器人。这些机器人相互协调以完成一项任务。这些机器人之间的通信可以通过无线方式进行&它们会相应地进行。在这个项目中,两个机器人被设计成一个操作系统的主人和另一个是一个奴隶,但这两个机器人之间的通信可以无线完成彼此。在这里,主机器人用于在执行任务时控制从机器人,而辅助机器人则依靠从主机器人接收到的信号来工作。
清洁机器人
本课题设计了一个机器人,即清洁机器人,来保持房屋的清洁和光亮。使用该机器人,只需按下智能手机上的按钮,就可以很容易地完成家里的地板和墙壁清洁工作。
欧洲杯四强竞猜平台文凭和工程学生的机器人项目理念
在机器人领域,处理机器人的设计欧洲杯四强竞猜平台、操作、构造、结构配置、制造和应用是很重要的。使用计算机技术,人们可以使用适当的硬件和传感器进行控制、感觉反馈和信息处理。机器人技术中使用了许多电机,通过专用的微控制器和欧洲杯四强竞猜平台适当的程序进行控制。因此,语言知识的汇编和' C '是设计机器人应用程序必须的。
如今,许多工科学生对机器人项目表现出浓厚的兴趣,与其他人相比,他们创造了很多兴趣。欧洲杯四强竞猜平台在学术层面上,机器人如循线机器人、拾取机器人、消防机器人、墙式机器人、六足机器人、类人机器人等是少数受欢迎的项目。
这里列出了最新年度工程欧洲杯四强竞猜平台学生的最新机器人项目思路。
- 超声波障碍物感应机器人车辆
- 通过手机机器人车辆运动
- 由电视遥控器操作的机器人车辆
- 加速度计(陀螺仪)控制机器人
- 射频(RF)控制的无线机器人
- 具有扬声器识别技术的语音操作机器人
- 计算机控制的照片和放置机器人(有线或无线)
- ZigBee受控船用无线视频和语音传输,夜视功能
- 具有人为视觉的自治机器人,用于障碍物检测
- 无线控制的烟雾和液化石油气探测机器人
- 可见光跟随机器人
- Android手机控制蓝牙机器人
- 无线操作的战区间谍机器人与夜视无线相机
- 用摄像机监控系统建造飞行四轮转子斩波器
- 数字罗盘和基于GPS的自行车的机器人
- 炸弹探测机器人
- 基于DTMF的无人机机器人控制海洋研究应用
- WiFi机器人由Android智能手机控制
- 无线室清新器喷涂机器人与视频视觉
- 基于DTMF的手机控制机器人
- 飞行与无线摄像机的四轮机器人砍刀
- GPS和数字圆满的自动导航机器人
- 带有无线摄像机的炸弹使机器人控制形式PC /笔记本电脑
- GSM (SMS)手机控制智能机器人
- 用于监控系统的无线语音和图像传输机器人
- 红外线追踪机器人(电视遥控电视)
- 现场人力检测和警报机器人
- 微电器机械传感器(MEMS)加速度计/陀螺自平衡机器人
- 手机蓝牙操作机器人
- 手机控制四足手边机器人,速度和方向控制
- 带有机械感应开关的障碍物检测机器人
- 具有超声传感器的障碍物检测机器人
- PC控制有线机器人
- 无线操作的战地路虎在感应到埋下的地雷时发出警报
- 使用强大的语音识别的人机界面
- PC控制无线多用途机器人
- 无线操作的灭火器机器人与喷水喷雾
- 远程控制的土地漫游者
- 机器人控制无线音频 - 视频流式摄像机
- 伺服电机控制无线摄像机控制系统
- 墙追随者机器人
- 语音控制无线电梯系统
- 基于超声避障系统的语音识别机器人
- 触摸屏控制智能机器人
- 语音操作智能灭火器车辆
获取有关各种信息的更多信息基于微控制器的工程学生机器人项目欧洲杯四强竞猜平台.
因此,这是所有的机器人项目想法的清单,为文凭和工程学生在不同的领域,如A欧洲杯四强竞猜平台rduino, Mini, Arm项目的想法,对未来的想法等。这些是最新的有趣的机器人项目想法,是为最后一年的工程学学生准备的。欧洲杯四强竞猜平台在机器人学术水平欧洲杯四强竞猜平台项目使用微控制器或机器人套件非常有名。因此,这些机器人项目对学生非常有帮助。除此之外,对这些项目的任何疑问或简单的机器人工欧洲杯四强竞猜平台程为初学者您可以通过评论下面的评论部分来提供宝贵的建议。
分享这个帖子:




我想要你的电子邮箱和联系方式。
是否有项目可以采用货到付款和网上付款方式?